General Information
- Official RZ/V2MA Device Website
- Product Page
- Please review the Documentation & Downloads section
- Evaluation Board Documentation
- Software Downloads
- Check "Software & Tool Pages" section on on this page
- Linux BSP Software
- RZ/V2MA Linux Package [5.10-CIP] v1.0.0
- RZ MPU Video Codec Library for RZ/V2MA
- DRP-AI Linux Driver
- RZ/V2MA DRP-AI Support Package Version 7.20
- DRP Image Processing Package
- RZ/V2MA OpenCV Accelerator Support Package Version 1.00
Loading Bootloader
The RZ/V2MA evaluation board may not be delivered with the latest IPL and uboot loaders. Please updated the board with the generated Yocto files. After following the Getting Started instructions the following files will be generated,
- loader_1st_128kb.bin
- loader_2nd.bin
- loader_2nd_param.bin
- u-boot.bin
- u-boot_param.bin
Manual
Instructions to load these IPL files is located in the RZV2MA Linux Getting Started Guide.
Commandline Script
We have a linux bash script to automate this.
Instructions
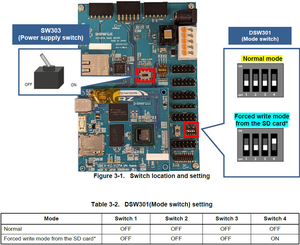 Set board to Forced Write Mode
Set board to Forced Write Mode
Step 1) This script requires that the flashwriter tool is loaded on the board. Set the board mode switch to "Forced Write Mode". Then follow section 4.2.3 to load the flash writer before running the script. Step 2) Navigate to the directory where the RZ/V2MA kernal, filesystem, and ipl files are deployed. Below is example of where this is.
/rzv2ma/build/tmp/deploy/images/rzv2ma
Step 3) Copy this script to that directory
Step 4) Set the script as executable
chmod +x Flash_loader.sh
Step 5) Execute the following command.
./Flash_loader.sh .
Getting Started
1. Software BSP Components
There is total of 4 packages to build the RZ/V2MA BSP. Up to 5 packages are used to build the BSP. Please download from the Official RZ/V2MA Website. Please look in the "Software Downloads" section.
Copy all ZIP file to a Linux PC.
The evaluation versions contain a time limitation that stops the software after a few hours.
- RZ/V2MA Linux Package : r01an6514ej<version>-rzv2ma-linux.zip.
- RZ MPU Video Codec Library for RZ/V2MA : RTK0EF0131F02000SJ-<version>_EN.zip
- RZ/V2MA DRP-AI Support Package: r11an0592ej<version>-rzv2ma-drpai-sp.zip.zip
- RZ/V2MA OpenCV Accelerator Support Package ( Image Processing):r11an0650ej<version>-rzv2ma-opencv-accelerator-sp.zip.
2. Build Environment
- To build the BSP, you will need a Linux PC running Ubuntu 20.04. Only this Host OS version was tested.
- You can use a Linux PC (recommended) or a Virtual Machine. If using a Virtual Machine, 200GB of hard drive space is recommended.
3. Build the BSP
- ⚠️ The complete build environment created by 'Linux BSP package' + 'DRP-AI Support package' + 'DRP OpenCV package' must be combined into the same directory.
- Use the directory name "rzv_vlp_v3.0.0"
- Detailed instructions
- for setup and building are located in the RZ/V2MA Linux Startup Guide documents included in each ZIP package for "Linux BSP", the "RZ/V2MA DRP-AI Support Package" zip file, and "RZ/V2MA OpenCV Accelerator Support Package".
- Build - NOTE: You must extract the archives in the order listed below.
- ⚠️ You must first follow the Linux Startup Guide(r01us0578ej<version>-rzv2ma-linux-startup-guide.pdf) instructions Section 2.0, but stop 🛑 before the 'bitbake' command.
- Second extract the Video Codec as specified in the manual ( r01us0600ej<version>-rz-v2ma.pdf ) that is included in the archive.
- Then, follow DRP-AI Support 'Release Note' (r11an0592ej<version>-rzv2ma-drpai-sp.pdf) Sections 3.1 and 3.2, but stop 🛑 before the 'bitbake' command.
- Finally Follow the OpenCV Accelerator Support Package 'Release Note' ( r11an0650ej<version>-rzv2ma-opencv-accelerator-sp.pdf) Section 2.0.
- A summary of the instructions located in the Release Notes are below. Simply Copy/Paste the commands.
4. Prepare an SD Card
- The evaluation boards can be booted from SD Cards. The SD card must be formatted and loaded using a Linux PC. A helpful script has been created (usb_sd_partition) that you can run on your Linux PC.
- Insert your micro SD card into a USB-SD-Card reader and then plug into a Linux PC.
- Use the commands below to download the formatting script and run. Please select your card and choose the default settings.
$ wget https://raw.githubusercontent.com/renesas-rz/rzg2_bsp_scripts/master/usb_sd_partition/usb_sd_partition.sh $ chmod +x usb_sd_partition.sh $ ./usb_sd_partition.sh
- Use the commands below to copy the files you build with the BSP to the SD card. Start in the base of your Yocto BSP.
# Change to the Yocto output directory that contains the files
$ cd build/tmp/deploy/images/smarc-rzv2l
# Copy the Linux kernel and Device Tree to partition 1
$ sudo cp -v Image /media/$USER/RZ_FAT
$ sudo cp -v r9a07g054l2-smarc.dtb /media/$USER/RZ_FAT
# Copy and expand the Root File System to partition 2
$ sudo tar -xvf core-image-weston-smarc-rzv2l.tar.gz -C /media/$USER/RZ_ext
(or if NOT using graphics)
$ sudo tar -xvf core-image-minimal-smarc-rzv2l.tar.gz -C /media/$USER/RZ_ext
# Make sure all files are finished writing before removing the USB card reader from the PC
$ sync
- Safely remove your USB card reader by right clicking on the drive icon (either RZ_FAT or RZ_ext) in Ubuntu and selecting "Eject"
5. Board Switch, LED and Serial Port information
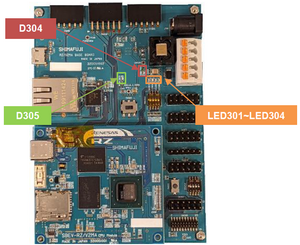
Led Placement |
Switch Information |
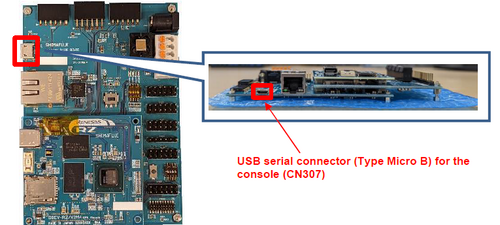
USB Serial Communication Port |
|---|
6. Power the Board and Connect to the Serial Port
- Power the Board with the AC Adapter
- Notice: Before connecting the AC adapter (J301) to an electrical outlet, make sure that the SW303 on the RZ/V2MA Base Board for the power supply is turned off.
- When the AC adapter is connected, the D304 light up.
- Turn switch SW303 on. LEDs LED302, LED304, and D305 light up, and RZ/V2MA boots.
- Now that the board is powered, plug a USB micro cable into the carrier board to the USB connector labeled "CN307". Use a serial terminal program to interact as you board. With a Linux PC, we recommend using "putty" (connects to /dev/USB0), and with a Windows PC we recommend "TeraTerm" that connects to COMx. The baud rate of the Serial connection is 115200 bps.
- Host PC will need the Silabs USB Driver can be found here.
7. Boot the Board
- Refer to the RZ/V3MA Startup Guide for information on booting from SD Card or eMMC
- SD Card refer to section 3.1
- eMMC refer to section 7.2
RZ/V2MA AI Translator
The AI Translator program provides a easy method to translate high end AI programming languages ( PyTorch, Tensorflow, Caffee, etc. ) to run on the Renesas DRP-AI hardware. The translator does this be translating the global standard ONNX format. High level AI languages support export of the AI to ONNX format.
The AI Translator and DRP-AI is designed for Vision based AI.
AI Translator Release Note Document shows the supported AI operators.
Official RZ/V2MA AI Translator Website here
For additional technical support for the AI Translator refer to this DRP-AI Translator wiki page here.
Note: This Translator is for the RZ/V2MA only refer to AI Translator page.
RZ/V2MA TVM Translator
While the AI Translator (see section above) can translate ONNX models to the DRP-AI hardware, it is restricted by the supported AI operations. This can restrict the number of supported AI Models. The TVM Translator expands the number of supported AI models for the RZ/V processors (currently RZ/V2MA). The TVM translates ONNX models by delegating the generated output between the DRP-AI and CPU.
Official RZ/V2MA TVM Translator Github repo..
This is the TVM Software framework based on the Apache TVM. The TVM includes python support libraries, and sample scripts. The python scripts follow the Apache TVM framework API found here.
- The TVM Provides the following
- Wider supported range of AI Networks that can run on the DRP-AI and CPU.
- Translate AI models from ONNX files
- Translate AI models from PyTorch PT saved models. ( For other supported AI Software Frameworks see Apache TVM)
- Translate models to run on CPU only. This allows models to run on RZG.
For more information try this wiki page
Overview
Content Tools