 General Information
General Information
- Official RZ/V2L Device Website
- Product Page
- Please review the Documentation & Downloads section
- Evaluation Board Documentation
- https://www.renesas.com/rzv2l-evaluation-kit
- Since the RZ/V2L and RZ/G2L devices are pin compatible, the same evaluation board design is used for both.
- Software Downloads
- Check "Software & Tool Pages" section on on this page
- RZ/V2L Linux Package
- Mali Graphic Library
- Video Codec Library
- RZ/V2L DRP-AI Support Package
- RZ/V2L ISP Support Package
- DRP-AI Translator
- RZ/V2L Cortex-M33 Multi-OS Package (optional)
- RZ/V2L SMARC EVK gadget: simple Coral camera holder (3D model)
Sharing of RZ/G2L Board Documentation
- Since the RZ/V2L and RZ/G2L devices are pin compatible, they share the exact same evaluation board design. Please refer to the RZ/G2L SMARC board page for reference.
- Board setup (button and switch) information
- Suggested LCD Monitors
RZ/V2L Boot Loaders Warning
⚠️ Warning.
The pre-loaded bootloaders (u-boot and ARM Trusted Firmware) on the RZ/V2L Evaluation Kit (SMARC board) are not up to date with the current BSP. It is strongly recommended that the bootloaders generated when building the BSP described in the Startup Guide document that is distributed with the BSP Package.
Known issues with pre-loaded loaders.
- DRP Demos will prematurely exit.
- ISP Demos will prematurely exit.
- RZV2L Multi-OS CM33 Debug fails connection
Available Demos
⭐ Prebuilt Demo Images ⭐
Renesas has prepared pre-built images available for download from renesas.com.

⭐⭐ RZ/V2L AI SDK Applications Demo SD Image
- Choice between USB Camera or MIPI-CSI Coral Camera
- Standalone demo requires HDMI LCD, USB keyboard and USB mouse.
- Recommended because easy setup.
- This is a complete SD Card image file that can be programmed using a Windows or Linux.
- https://www.renesas.com/us/en/document/sws/rzv2l-ai-applications-demo-sd-image-version-200
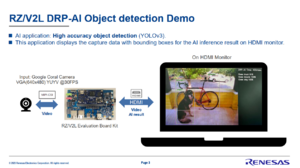
RZ/V2L DRP-AI Object Detection and Pose Estimation DEMO
- Uses MIPI-CSI Coral camera and external HDMI Display
- Recommended because easy setup
- This is a complete SD Card image file that can be programmed using a Windows or Linux.
- https://www.renesas.com/us/en/document/sws/rzv2l-drp-ai-object-detection-and-pose-estimation-demo
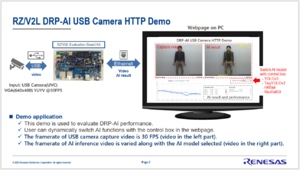
RZ/V2L DRP-AI USB Camera HTTP Demo SD Image version
- Images are captured using a USB Camera and then processed using DRP-AI. The results are then sent over Ethernet to be viewed in a web browser.
- This is a complete SD Card image file that can be programmed using a Windows or Linux.
- https://www.renesas.com/us/en/document/sws/rzv2l-drp-ai-usbcamera-http-demo-sd-image-version
RZ/V2L DRP-AI USB Camera HTTP Demo Pre-build version
- Images are captured using a USB Camera and then processed using DRP-AI. The results are then sent over Ethernet to be viewed in a web browser.
- This package contains individual binary files that can be used to create an bootable SD Card.
- A Linux PC is required to format the SD Card, and then extract and copy the files to the correct location on the SD Card.
- https://www.renesas.com/us/en/document/sws/rzv2l-drp-ai-usbcamera-http-demo-pre-build-version
DRP-AI Pretrained Applications
Please see the DRP-AI Pretrained Models page for details about pretrained applications.
DRP-AI Demos
The RZV2L DRP-AI Demos can be found here.
These demos include pre-build applications, source code and documentation about the DRP-AI.
Simple ISP Demos
Information about the RZV2L Simple ISP can be found here.
These demos include pre-build applications, source code and documentation about the DRP-AI and ISP.
Camera Data Receive Unit (CRU) Sample Application
- https://github.com/renesas-rz/rz_cru_sample_code
- This sample application demonstrates using CRU functions for various image processing tasks like demosaicing raw camera data, color correction, and some simple camera functions.
GStreamer Application Note
- RZ/G2L Group and RZ/V2L Group Linux Interface Specification GStreamer User's Manual
- This User's Manual (Application Note) explains GStreamer and the custom plug-ins created by Renesas.
- Usage examples are also included.
Getting Started
📄 Board User Manual
- The User Manual for the boards can be found their website pages on renesas.com.
- Check the 'General Information' section on this page for the links.
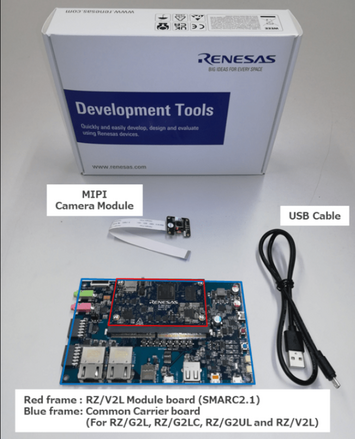
📦 What is included in the kit
- A Micro USB cable for serial console.
🛒 What you will need to purchase
- Power: (Required) USB Type-C power supply. 5V or 9V can be used. To use 9V, switch SW11-4 change is needed (please see the board manual).
- HDMI LCD: An LCD monitor with an HMDI input. Here is a list of tested touchscreen monitors: RZ-G/RZ-G2L_SMARC#LCD_Monitors
- mini-HDMI Adapter: The connector on the board is type mini-HDMI.
- USB Camera: A camera supporting USB Video Class (UVC) such as Logitec C270, C920, C922, BRIO Ultra HD Pro.
- USB Mouse: In the case that you do not have a touchscreen LCD monitor.
💻 Build Environment
⚠️ The BSP will only build in Ubuntu 20.04
- To build the BSP, you will need a Linux PC running Ubuntu 20.04. This was the only host OS that was tested and that specific version is a requirement of Yocto 3.1 (dunfell). Using Ubuntu 22.04 will not work
- You can use a Linux PC (recommended) or a Virtual Machine. If using a Virtual Machine, 200GB of hard drive space is recommended for the minimum build.
- If you are not currently running Ubuntu 20.04, you can use a docker container.
- Example: Host Machine = Ubuntu 22.04 + Docker Container running Ubuntu 20.04 inside of it
- Some docker setup instructions and scripts are provided to make it easy to get started.
💾 Downloading the Linux BSP
Up to 5 packages are used to build the BSP.
Please download from the Official RZ/V2L Website. Please look in the "Software Downloads" section.
Links to all the downloads can be found on the 📦 RZ/V2 Linux BSP on this site. Please refer to the sections that support RZ/V2L.
Copy all ZIP file to a Linux PC.
The evaluation versions contain a time limitation that stops the software after a few hours.
- RZ/V Verified Linux Package: RTK0EF0045Z0024AZJ-<version>.zip.
- RZ MPU Graphics Library Evaluation Version: RTK0EF0045Z13001ZJ-<version>_EN.zip
- RZ MPU Video Codec Library Evaluation Version: RTK0EF0045Z15001ZJ-<version>_EN.zip
- RZ/V2L DRP-AI Support Package: r11an0549ej<version>-rzv2l-drpai-sp.zip
- RZ/V2L ISP Support Package ("Simple ISP" by DRP-AI): r11an0561ej<version>-rzv2l-isp-sp.zip
- HTML5 Packages for Gecko91 or Gecko102 (firefox and webviewer; released for RZ/G2L only, but could be used for RZ/V2L as well): RTK0EF0045Z40001ZJ_<version>.zip
(*): Refer to DRP-AI Demos section for changes to the DRP-AI package that could effect you application.
🔨 Building the BSP
- ⚠️ The complete build environment created by 'Linux BSP package' + 'DRP-AI Support package' + 'ISP Support package' must be combined into the same directory.
- Use the directory name "rzv_vlp_v3.0.4"
- Detailed instructions for setup and building are located in the Release Note documents included in each ZIP package for "Linux BSP" and "DRP-AI Support".
- ⚠️ You must first follow the Linux BSP Release Note instructions Section 3.1, but stop 🛑 before the 'bitbake' command.
- Then, follow DRP-AI Support 'Release Note' (r11an0549ej<version>-rzv2l-drpai-sp.pdf) Sections 3.1 and 3.2, but stop 🛑 before the 'bitbake' command.
- Finally Follow the ISP Support 'Release Note' ( r11an0561ej<version>-rzv2l-isp-sp.pdf) Section 2.0.
- A summary of the instructions located in the Release Notes are below. Simply Copy/Paste the commands.
👓 Verification
After the above script is run there will be a new folder call meta-rz-features. This will include, among others sub-folders for the MALI GPU, Video Codec, DRP, and ISP.
meta-rz-features/ ├── meta-rz-codecs ├── meta-rz-drpai ├── meta-rz-graphics ├── meta-rz-multi-os ├── meta-rz-simple-isp └── Readme.md
OSS_Package
This archive contains many of the yocto pacakges used to build the RZ BSP. Between releases some of these packages may no longer be supported in the current Renesas VLP. By modifying the yocto local.conf configuration file to use the packages in this archive allows continued build support of the current released VLP. Add the following to the locat.conf file.
DL_DIR = "Absolute Path to extracted oss_package"
Prepare an SD Card
- The evaluation boards can be booted from SD Cards. The SD card must be formatted and loaded using a Linux PC. A helpful script has been created (usb_sd_partition) that you can run on your Linux PC.
- Insert your micro SD card into a USB-SD-Card reader and then plug into a Linux PC.
- Use the commands below to download the formatting script and run. Please select your card and choose the default settings.
$ wget https://raw.githubusercontent.com/renesas-rz/rzg2_bsp_scripts/master/usb_sd_partition/usb_sd_partition.sh $ chmod +x usb_sd_partition.sh $ ./usb_sd_partition.sh
- Use the commands below to copy the files you build with the BSP to the SD card. Start in the base of your Yocto BSP.
# Change to the Yocto output directory that contains the files
$ cd build/tmp/deploy/images/smarc-rzv2l
# Copy the Linux kernel and Device Tree to partition 1
$ sudo cp -v Image /media/$USER/RZ_FAT
$ sudo cp -v r9a07g054l2-smarc.dtb /media/$USER/RZ_FAT
# Copy and expand the Root File System to partition 2
$ sudo tar -xvf core-image-weston-smarc-rzv2l.tar.gz -C /media/$USER/RZ_ext
(or if NOT using graphics)
$ sudo tar -xvf core-image-minimal-smarc-rzv2l.tar.gz -C /media/$USER/RZ_ext
# Make sure all files are finished writing before removing the USB card reader from the PC
$ sync
- Safely remove your USB card reader by right clicking on the drive icon (either RZ_FAT or RZ_ext) in Ubuntu and selecting "Eject"
Power the Board and Connect to the Serial Port
- Supply power the board using the USB-C connection on the carrier board labeled "Power Input"
- On the carrier board, press the red button in order to turn on power to the board. The green LED labeled "Carrier PWR On" will be lit when power is on.
- Now that the board is powered, plug a USB micro cable into the carrier board to the USB connector labeled "SER 3 UART". Use a serial terminal program to interact as you board. With a Linux PC, we recommend using "putty" (connects to /dev/USB0), and with a Windows PC we recommend "TeraTerm" that connects to COMx. The baud rate of the Serial connection is 115200 bps.
- Press the blue reset button, and then "u-boot" will start. Within 3 seconds, press the space bar on your keyboard in order to stop the auto-boot sequence.
Switch settings for the CPU SOM board.
- The SOM board contains a eMMC Flash device and a Micro SD Card socket. On the SOM board, you can only use one or the other because they are both connected to the same peripheral channel on the RZ/V2L.
- Set the switches on the SOM board to what you want to use.
- ⚠️ u-boot environment variables are always stored in eMMC Flash (not SPI flash). This means if you change switch SW1-2 to OFF on the SOM board, you cannot access saved u-boot environments variables and you will always get the message "*** Warning - MMC init failed, using default environment"
- Note that the SD Card slot on the Carrier board will always work regardless of the setting of SW1-2 because it uses a separate peripheral channel on the RZ/V2L.
- On the SOM (CPU) board, there is a little switch (SW1) near the SD card socket.
SOM board uses SD Card socket SOM board uses eMMC Flash (recommended)
SW1-1 = ON/OFF(JTAG) SW1-1 = ON/OFF(JTAG)
SW1-2 = ON SW1-2 = OFF
+-----+ +-----+
| ON | | ON |
| = = | | = |
| | | = |
| 1 2 | | 1 2 |
+-----+ +-----+
Boot the Board
Choose option 7-1 or 7-2 or 7-3 below.
Option 7-1 is recommended.
Boot the Board using SD Card on Carrier Board (Recommended)
- Insert the SD card into the socket on Carrier Board.
┌─────┬─────┬─────┐
│ │ SOM │ │
│ └─────┘ │
│ Carrier Board │
│ ┌─┐ │
└─────┴─┴─────────┘
↑
SD Card Socket
- Press the blue reset button, and then "u-boot" will start. Within 3 seconds, press the space bar on your keyboard in order to stop the auto-boot sequence.
- At the u-boot prompt ( => ), enter the following commands to boot the board:
RZ/V2L EVK Booting Commands:
# Create command macros and save them: => setenv sd_boot1 'mmc dev 1 ; fatload mmc 1:1 0x48080000 Image ; fatload mmc 1:1 0x48000000 r9a07g054l2-smarc.dtb' => setenv sd_boot2 'setenv bootargs 'root=/dev/mmcblk1p2 rootwait' ; booti 0x48080000 - 0x48000000' => setenv bootcmd 'run sd_boot1 sd_boot2' => saveenv # Reset the board and it will automatically boot
Boot the Board using eMMC Flash on SOM Board
- Set switch SW1-2 = OFF
- The boot loader (u-boot) by default will try to boot from eMMC after 3 seconds.
- Press the blue reset button and wait.
Boot the Board using SD Card on SOM Board (eMMC Flash disabled)
- Set switch SW1-2 = ON
- Insert the SD card into the socket on SMARC SOM CPU board (not the carrier board).
- Press the blue reset button, and then "u-boot" will start. Within 3 seconds, press the space bar on your keyboard in order to stop the auto-boot sequence.
- Note that you will get this message every time "*** Warning - MMC init failed, using default environment" because u-boot environment variables are stored in eMMC Flash (that you disabled)
- At the u-boot prompt ( => ), enter the following commands to boot the board:
# Manually enter the following commands to boot => mmc dev 0 ; fatload mmc 0:1 0x48080000 Image ; fatload mmc 0:1 0x48000000 /r9a07g054l2-smarc.dtb => setenv bootargs 'root=/dev/mmcblk0p2 rootwait' ; booti 0x48080000 - 0x48000000
Linux Login
- The login will be "root" (no password is needed)
RZV2L Cortex-M33 Multi-OS Package
Instructions for RZV Cortex-M33 Multi-OS Package is located below.
Cortex-M33 Multi-OS Package Support
Supported MIPI Camera modules for RZ/V2L EVK
Additional Supported Camera Modules are listed below:
e-CAM20_CURZ is an AR0234-based Full HD Color Global Shutter Camera. It supports the UYVY image format and is provided with an M12 lens holder – which together make it compatible with Renesas ® RZ/V2L. Its key features make e-CAM20_CURZ a perfect fit for applications like AMR, smart shopping, smart traffic, etc. (Order number: e-CAM20_CURZ_1H01R2)
e-CAM21_CURZ is a Full HD Ultra low light camera for Renesas ® RZ/V2L based on the Sony® STARVIS™ IMX462 sensor. It comes with superior NIR performance and is equipped with an inbuilt ISP and an M12 lens holder – making it ideal for applications like people counting, animal tracking, smart agriculture, etc. (Order Number: 2. e-CAM21_CURZ_1H01R2 )
Enable eMMcC Flash
The instructions to enable the RZV2L to boot from eMMC Flash at on the RZG2L Page here
Program On-Board eMMC Flash
The instructions to enable the RZV2L to load the Linux kernel, DTB, and Filesystem RZG2L Page here
Fix rngd bug that randomly keeps all CPUs busy after startup
RZ MPUs (at least non-secure versions) do not have a hardware random number generation module (/dev/hwrng), but that's the default setting for the systemd rngd service.
With that, rngd occupies the CPU resources to build up entropies during start-up.
Randomly, this process does not end properly and slows down the entire system significantly.
But if an available pseudorandom number generator is selected, rngd finishes properly always.
The following modification is sufficient:
Before you build the BSP, modify
poky/meta/recipes-support/rng-tools/rng-tools/default
from
EXTRA_ARGS="-r /dev/hwrng"
to
EXTRA_ARGS="-r /dev/urandom -x jitter"
However, normally you do not want to modify the original recipe but instead create a new one to override the old one.
- Create a new folder:
mkdir - p meta-renesas/recipes-rzg2l/recipes-support/rng-tools - Change dir:
cd meta-renesas/recipes-rzg2l/recipes-support/rng-tools - Create a new file in that folder:
vi rng-tools_%.bbappend - Edit the file just created and add these lines:
FILESEXTRAPATHS:prepend := "${THISDIR}/${PN}:"SRC_URI += "file://default"(1) - Create another folder:
mkdir -p rng-tools - Add a file
vi default - Add the new content into it:
EXTRA_ARGS="-r /dev/urandom -x jitter" - Rebuild the image with the new package:
bitbake core-image-weston
(1) Note that this is the new Yocto syntax. For older versions of Yocto you may need to replace : (colon) with _ (underscore): so FILESEXTRAPATHS_prepend.
Alternatively, you can modify the
/etc/default/rng-tools
file in the current target rootfs accordingly.
DRP-AI Driver Version 7.00
This version to the DRP-AI Reserve Area has changed from 0x70000000 to 0x80000000, because of this older versions of the DRP-AI Implementation Source code will fail with the following errors.
[ERROR] Failed to run DRPAI_ASSIGN : errno=22
[ERROR] Failed to run load_data_to_mem : resnet50_cam/drp_desc.bin
[ERROR] Failed to load DRPAI Data
This is due to the generated DRP Translator files map to the older address. Please use the DRP Translator version 1.70 when generating the DRP files and use the latest sample code included in the DRP-AI package version 7.0.
Overview
Content Tools